


Robot công nghiệp được thiết kế số trục khác nhau để phù hợp với mục đích sử dụng. Đa số các robot được thiết kế khớp nối 6 trục. Robot 6 trục hay Robot 6 bậc tự do giúp tăng sự linh hoạt khi thực hiện các tác vụ. Robot 6 trục được ứng dụng rộng rãi hơn các loại robot có ít trục hơn.
Vậy bạn có thắc mắc tại sao lại sử dụng robot 6 trục mà không phải là 3, 4, 5 hay 7 trục? Ngay trong bài viết này, G7 corp sẽ giúp bạn hiểu hơn về robot 6 trục và khi nào thì nên sử dụng robot 6 trục.

>>Xem thêm Robot công nghiệp hàn - Robot 6 trục<<
1. Cấu tạo robot 6 trục gồm những thành phần nào?
Trục 1: Thường nằm ở đế của robot 6 trục. Trục này giúp robot 6 trục có thể xoay trái và phải, mở rộng khu vực làm việc, bao gồm khu vực ở hai bên và phía sau cánh tay. Trục này cho phép robot 6 trục quay tối đa 180 độ từ điểm trung tâm.
Trục 2: giúp cánh tay dưới của robot 6 trục mở rộng về phía trước và phía sau. Đồng thời, nó cung cấp năng lượng cho sự chuyển động của toàn bộ cánh tay dưới robot 6 trục.
Trục 3: giúp mở rộng tầm với của robot 6 trục, cho phép cánh tay trên nâng lên và hạ xuống. Một số mô hình khớp nối, nó còn có thể giúp cánh tay trên vươn ra phía sau cơ thể, tiếp tục mở rộng khu vực làm việc. Trục này giúp cho cánh tay trên của robot 6 trục truy cập bộ phận tốt hơn.
Trục 4: hoạt động cùng với trục 5, hỗ trợ cho việc định vị bộ phận đầu cuối và thao tác của bộ phận. Được biết đến như là cuộn cổ tay, nó xoay cánh tay trên theo chuyển động tròn, làm di chuyển các phần giữa các hướng ngang và dọc của robot 6 trục.
Trục 5: giúp cổ tay của cánh tay robot 6 trục nghiêng lên xuống. Trục này chịu trách nhiệm cho chuyển động cao độ và chuyển động lệch. Các chuyển động cao độ, uốn cong, hoặc lên và xuống cũng giống như mở và đóng nắp hộp. Trục này của robot 6 trục chuyển động lệch sang trái và phải giống như một cánh cửa trên bản lề.
Trục 6: bộ phận này là cổ tay của cánh tay robot 6 trục, chịu trách nhiệm cho một chuyển động xoắn cho phép nó xoay tự do theo chuyển động tròn để định vị các bộ phận đầu cuối và để thao tác các bộ phận. Trục này của robot 6 trục thường có khả năng xoay hơn 360 độ theo chiều kim đồng hồ hoặc ngược chiều kim đồng hồ.
2. Ưu điểm chính của cánh tay robot 6 trục là gì?
Một cánh tay robot 6 trục có thể chạm bất kỳ điểm nào ở bất kỳ hướng nào trong khu vực xung quanh nó. Điều này giúp robot 6 trục có thể thực hiện được nhiều công việc như:
Lấy một công cụ từ dưới cùng (ví dụ: tuốc nơ vít), xoay và đặt nó lại chỗ cũ
Mở ngăn kéo, lấy đồ vật và đóng ngăn kéo
Viết văn bản trên bàn, trên tường hoặc bất kỳ bề mặt nào khác
* Thường có 2 cách để điều khiển robot 6 trục:
Thứ nhất là Điều khiển động học nghịch;
Thứ hai là Điều khiển động học thuận.
Hai cách này điều khiển robot 6 trục khá chính xác, nhưng không phải lúc nào chúng cũng rõ ràng. Khi bạn cần robot 6 trục thực hiện một động tác phức tạp, với một định hướng phức tạp thì việc tìm ra các điểm chỉ thông qua những con số thì khá khó khăn.
Đó cũng là lý do tại sao một số robot có “chế độ học tập” để cho phép bạn “lập trình” robot bằng cách di chuyển nó bằng tay của bạn. Robot sau đó sẽ biết vị trí chính xác của nó nhờ bộ mã hóa trên tất cả 6 trục.
3. Cấu tạo robot 6 trục có cần thiết trong tất cả mọi trường hợp không?
Câu trả lời là Không. Vì một cánh tay robot 6 trục có thể đáp ứng quá mức nhu cầu trong một số trường hợp. Đối với các tác vụ đòi hỏi độ chính xác nhưng không cần chuyển động quá phức tạp thì dùng một robot đơn giản là đã ổn.
Giả sử bạn cần làm ra một máy in 3D cơ bản hoặc một máy CNC. Robot 6 trục có thể cung cấp cho bạn các tính năng tốt hơn, nhưng ở trường hợp này chỉ cần dùng Robot 3 trục (dịch x, dịch y và dịch z), không cần sử dụng các phép quay vì bạn chỉ vận hành từng lát cắt trên trục z.
Nhưng làm thế nào để xử lý một loạt các máy in 3D? Bản thân máy có thể được chế tạo chỉ với 3 trục, nhưng làm sao để có thể tự động hóa một dòng trong số đó?
Đây là lúc cánh tay robot 6 trục phát huy tác dụng. robot 6 trục này sẽ có thể chọn một phần được in 3D, nhấn một số nút và khởi chạy lần in tiếp theo. Với một robot bạn có thể điều khiển nhiều máy in 3D.
4. Các lưu ý để sử dụng tốt nhất không gian làm việc cho cánh tay robot 6 trục
Lưu ý 1: Đặt TCP (điểm trung tâm công cụ) của bạn càng gần mặt bích robot 6 trục càng tốt
Trong kiểm tra, điều khá phổ biến là phải trình bày một phần trước máy ảnh với phạm vi định hướng lớn. Trong một ứng dụng như vậy, quy tắc đầu tiên là đặt khung tham chiếu dao gần nhất có thể với khung tham chiếu mặt bích của robot 6 trục. Nói cách khác, bạn phải thiết kế một hệ thống kẹp cho phép bạn kẹp chặt phần cần kiểm tra càng gần càng tốt với mặt bích của robot 6 trục.
Đối với một số ứng dụng, có thể thiết kế tấm bộ điều hợp của riêng bạn để gắn bộ kẹp theo cách sao cho các ngón tay và trục của khớp 6 nằm trong một mặt phẳng hoặc gắn bộ kẹp dọc theo trục của khớp 6. Một cách khác có thể là sử dụng ngón tay hình chữ L.
Lưu ý 2: Không di chuyển trong chế độ Cartesian của robot 6 trục trừ khi đi theo một đường dẫn
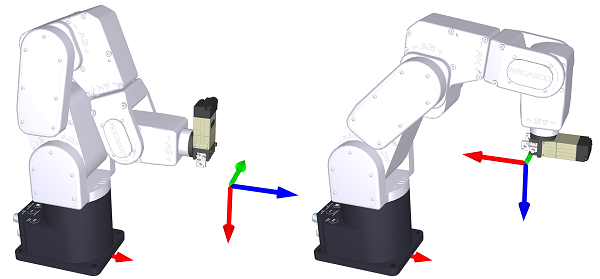
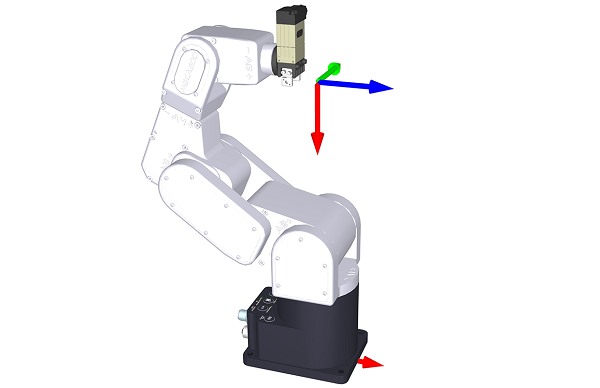
Trong kiểm tra, bạn thường cần xoay một sản phẩm theo các hướng khác nhau. Tất nhiên, trong những trường hợp này, việc sử dụng lệnh MoveLinRelTRF hoặc chạy robot 6 trục ở chế độ Cartesian sẽ dễ dàng hơn nhiều. Tuy nhiên, cả hai cách tiếp cận đều thất bại nếu một điểm kỳ dị xuất hiện dọc theo vòng quay, như trong ví dụ minh họa trong hình dưới đây. Khi đó, bạn không thể xoay đầu cuối về trục Y của nó (trục màu xanh lá cây) ở góc 90 °, vì điểm kỳ dị (trục của khớp 4 và 6 trở nên thẳng hàng).
Do đó, bạn phải học cách sử dụng các góc Euler và sử dụng lệnh MovePose thay thế. Ngoài ra, bạn có thể sử dụng RoboDK. Vì RoboDK là một trình giả lập, nó cho phép bạn vượt qua các điểm kỳ dị trong chế độ của Cartesian. Bất kể điểm kỳ dị, luôn sử dụng các lệnh MovePose hoặc MoveJoints trừ khi bạn muốn TCP của mình đi theo một đường dẫn cụ thể. Việc sử dụng các lệnh này thường dẫn đến thời gian chu kỳ nhanh nhất.
Lưu ý 3: Nếu cáp hạn chế khớp 6 robot 6 trục quá nhiều, hãy căn chỉnh các trục của khớp 1, 4 và 6 của robot 6 trục
Mặc dù khớp 6 của robot 6 trục không giới hạn về mặt cơ học, nhưng nếu bạn sử dụng đầu nối có gắn cáp, phạm vi của khớp 6 sẽ bị giới hạn trong khoảng ± 180 ° hoặc thậm chí ít hơn. Nếu bạn cần nhiều phạm vi hơn, bạn có thể căn chỉnh trục của khớp 4 và 6 hoặc thậm chí của khớp 1, 4 và 6. Tất nhiên, cấu hình như vậy sẽ là số ít, vì vậy bạn sẽ cần sử dụng lệnh MoveJoints để xoay quanh các trục bị trùng.
Lưu ý 4: Nếu robot 6 trục của bạn sử dụng thiết bị đầu cuối có dây cáp, hãy giữ khớp 6 của robot 6 trục càng gần càng tốt đến 0 độ
Bất cứ khi nào có thể, ở tư thế mong muốn, cố gắng giữ khớp 6 của robot 6 trục càng gần 0 độ càng tốt. Ví dụ, nếu bạn lấy một phôi ở vị trí robot 6 trục trong đó khớp 6 ở 170 °, và sau đó thực hiện lệnh MovePose, khớp 6 có thể sẽ xoay rất nhiều. Ví dụ, nếu ở tư thế mong muốn mới, khớp 6 có thể ở 190 °, robot 6 trục sẽ tự động xoay khớp cuối cùng 340 ° theo hướng ngược (thay vì 20 ° theo hướng xuôi).
Lưu ý 5: Nếu bạn cần robot 6 trục định hướng nhiều, hãy đặt TCP của bạn trên trục của khớp 1
Nếu bạn cần bao quát một phạm vi định hướng rộng, thì bạn phải đặt TCP của mình trên trục khớp 1 của robot 6 trục. Cấu hình như vậy sẽ cho phép bạn xoay
± 175° về trục của khớp 1 và ± 180 ° về trục khớp 6. Càng xa trung tâm của cổ tay robot 6 trục từ khớp 1, khả năng định hướng của robot 6 trục càng ít.
Lưu ý 6: Thử tất cả các cấu hình robot 6 trục
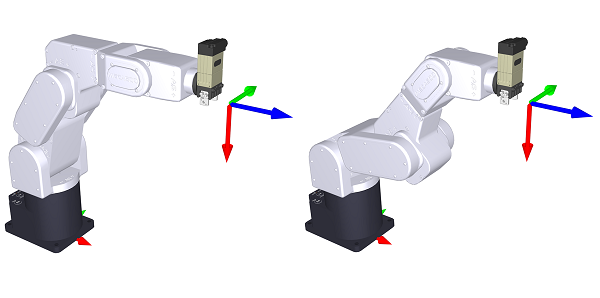
Đôi khi, robot 6 trục sẽ quá gần với một điểm kỳ dị trong một hoặc nhiều tư thế đầu cuối cần đạt được. Trong một ứng dụng kiểm tra, đó có thể không phải là vấn đề, nhưng nếu bạn cần chọn hoặc đặt một đối tượng, thì có lẽ bạn cần phải đến và rời khỏi tư thế cuối cùng trong chế độ tuyến tính. Trong trường hợp như vậy, kiểm tra tất cả các cấu hình robot 6 trục có thể và chọn một cấu hình xa nhất từ các điểm kỳ dị. Ví dụ, trong hình dưới đây, cấu hình bên trái quá gần với điểm kỳ dị (trục 4 và 6 gần như thẳng hàng), nhưng cấu hình bên phải đủ xa so với điểm kỳ dị.
Lưu ý 7: Cân nhắc nhiều hơn là chỉ đạt được
Không gian làm việc của cánh tay robot 6 trục là một tập hợp các không gian làm việc được phân tách bằng các điểm kỳ dị. Trên hết, không phải tất cả các tư thế có thể đạt được đều tốt như nhau. Thật vậy, không gian làm việc của cánh tay robot 6 trục rất không đồng nhất, về tiêu chí hiệu suất như tốc độ và độ chính xác. Bạn cần phải tránh càng xa càng tốt từ điểm kỳ dị, khi di chuyển trong chế độ Cartesian. Ngoài ra, cánh tay robot 6 trục càng căng, độ chính xác của nó càng kém và càng mất nhiều thời gian hơn để triệt tiêu các rung động tại tooltip.
Lưu ý 8: Tận dụng sự dư thừa của robot 6 trục nếu bạn không cần phải có 6 bậc tự do
Trong nhiều trường hợp, bạn chỉ cần 5 bậc tự do nhưng bạn có robot 6 trục. Ví dụ, nếu bộ phận đầu cuối của bạn là bộ phân phối keo hoặc trục chính, bạn có thể không quan tâm đến việc định hướng nó. Ngoài ra, nếu bạn kiểm tra phôi bằng cảm biến đối xứng trục như máy ảnh, trong nhiều trường hợp, bạn có thể trình bày phôi trong bất kỳ góc quay nào về trục của cảm biến. Trong những trường hợp này, không căn chỉnh trục của khớp 6 của robot 6 trục với trục đối xứng của công cụ hoặc cảm biến của bạn và chọn vị trí tốt nhất trong vô số vị trí robot 6 trục cho từng tư thế cần đạt được. Tốt nhất có nghĩa là xa các điểm kỳ dị, nhưng cũng gần nhất với các tư thế trước và thành công cần đạt được.
Lưu ý 9: Cố định cánh tay robot 6 trục của bạn ở tư thế thẳng đứng, trừ khi thực sự cần thiết
Như hầu hết các robot công nghiệp có thể được gắn vào bất kỳ hướng nào (ví dụ: treo ngược hoặc gắn trên tường). Vấn đề duy nhất với bất kỳ cụm robot được gắn không thẳng đứng nào là bạn cần một vật cố định rất chắc chắn, điều này có thể làm cho robot 6 trục của bạn trở nên cồng kềnh và tốn kém hơn. Do đó, chỉ chọn phương án gắn robot 6 trục không thẳng đứng sau khi đã cố gắng để có một robot 6 trục thẳng đứng nhưng không được.
Xem video về Robot hàn công nghiệp Chaifu - Robot 6 trục
---------
Mua Robot ở đâu đảm bảo chất lượng?
---------
Công ty Cổ phần Tập đoàn Thiết bị G7 là nhà phân phối chính thức sản phẩm Robot công nghiệp mang thương hiệu Chaifu tại Việt Nam.
Với nhiều năm hoạt động trong lĩnh vực sản xuất trạm trộn bê tông và cung cấp máy móc, thiết bị và vật tư trong và ngoài nước, Tập đoàn G7 xứng đáng là nhà cung cấp để các khách hàng đặt niềm tin.

>>Xem thêm Robot công nghiệp hàn<<
>>Xem thêm Robot công nghiệp xếp dỡ<<
>>Xem thêm catalogue Robot công nghiệp Chaifu<<
Các sản phẩm nhập khẩu của công ty G7 Corp có độ chính xác cao, độ ổn định cao và tuổi thọ cao. Robot công nghiệp Chaifu bao gồm các tải Robot phổ dụng sáu trục 6KG, 7KG, 10KG, 20KG, 50KG, 165KG. 210KG, bốn trục 8KG, 15KG, 25KG, 50KG, 130KG, 165KG. Robot Chaifu với 4-6 bậc tự do được sử dụng rộng rãi trong hàn hồ quang, hàn điểm, cắt plasma, dập, phun, mài, xếp dỡ máy công cụ, xếp dỡ, xử lý, giảng dạy và các lĩnh vực khác, tạo ra giá trị tối đa cho khách hàng.
Liên hệ ngay để nhận báo giá chi tiết Robot công nghiệp
Ưu điểm của Robot công nghiệp Chaifu
- Robot công nghiệp Chaifu với thiết kế nhiều trục giúp chuyển động linh hoạt;
- Robot được điều khiển bằng động cơ AC servo, giúp chạy ổn định và chính xác;
- Giảm nhiễu lẫn nhau giữa tay đòn và bộ cố định;
- Giảm thiểu sự can thiệp lẫn nhau giữa cáp và bộ cố định;
- Cáp đồng trục tích hợp có thể ngăn cáp không bị uốn cong và nâng cao chất lượng công việc;
- Bảo trì robot dễ dàng;
- Cánh tay trên có thiết bị độc lập cấu trúc hỗ trợ, có thể được tháo rời ở một bên. Thay thế nhanh hơn và dễ dàng hơn.
Liên hệ ngay để nhận báo giá
>> Xem thêm bài viết Giải đáp thắc mắc về Robot công nghiệp tại đây <<
- Trạm trộn bê tông 120m3/h (23.09.2022)
- Bật mí tất tần tật về trạm trộn bê tông 90m3/h (21.09.2022)
- Trạm trộn bê tông 30m3/h - xử lý ngon lành mọi công trình nhỏ (20.09.2022)
- Trạm trộn bê tông 60m3/h bê tông chất lượng - tiến độ tốc hành (15.09.2022)
- Bản vẽ trạm trộn bê tông (12.09.2022)
- Phễu cốt liệu mô hình trạm trộn bê tông 2022 là gì??? (09.09.2022)
- Tổng quan nhà máy trạm bê tông tươi 2022 (07.09.2022)
- Băng tải công nghiệp cho trạm trộn (05.09.2022)
- Trạm trộn bê tông cường độ siêu cao uhpc (29.08.2022)
- Thủ tục xin cấp phép trạm trộn bê tông (24.08.2022)
- Những lưu ý khi lắp đặt trạm trộn bê tông tươi (23.08.2022)
- Lọc bụi silo xi măng – giải pháp tốt bảo vệ môi trường 2022 (18.08.2022)
- Trạm trộn bê tông nhựa nóng (16.08.2022)
- Trạm trộn bê tông tiếng anh là gì? (15.08.2022)
- Vận hành trạm trộn bê tông - khám phá xuyên suốt quá trình (11.08.2022)
- Công suất trạm trộn bê tông sự thật ít biết năm 2022 (09.08.2022)

